The underlying goal is to get a model or system that takes in a sequence of text, and returns a scalar reward which should numerically represent the human preference. The system can be an end-to-end LM, or a modular system outputting a reward (e.g. a model ranks outputs, and the ranking is converted to reward). The output being a scalar reward is crucial for existing RL algorithms being integrated seamlessly later in the RLHF process.
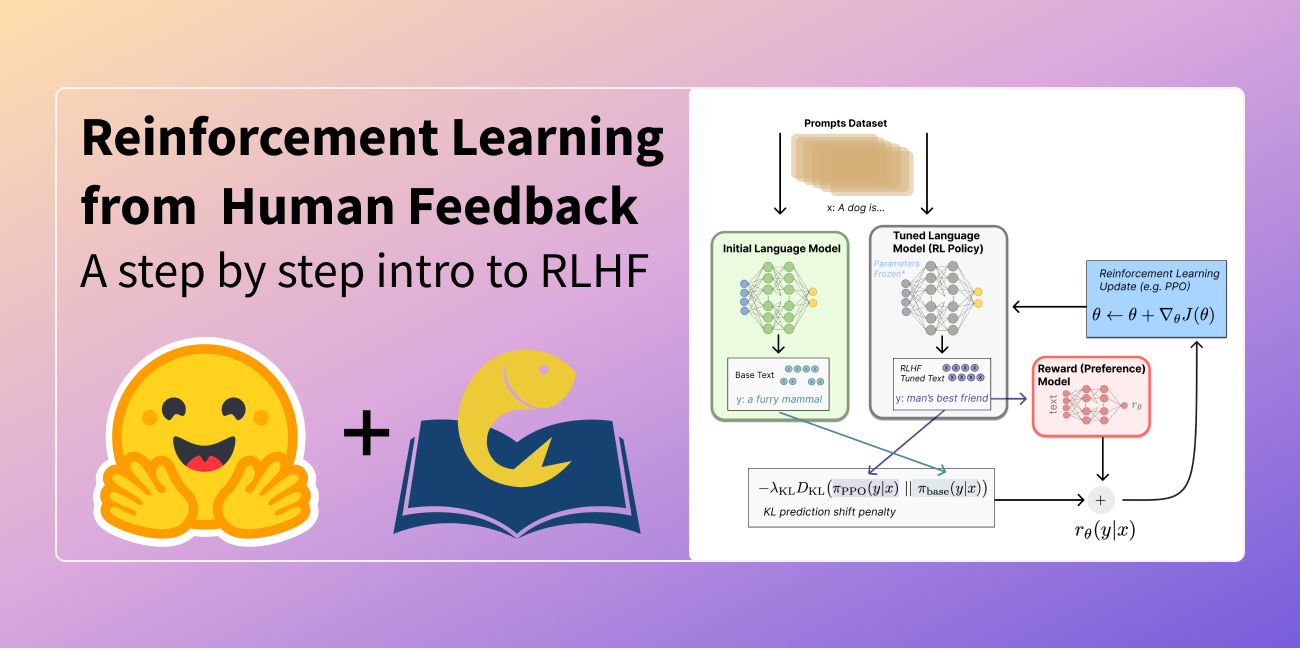
First, the policy is a language model that takes in a prompt and returns a sequence of text (or just probability distributions over text). The action space of this policy is all the tokens corresponding to the vocabulary of the language model (often on the order of 50k tokens) and the observation space is the possible input token sequences, which is also quite large (size of vocabulary ^ number of input tokens). The reward function is a combination of the preference model and a constraint on policy shift. The reward function is
The KL divergence term penalizes the RL policy from moving substantially away from the initial pretrained model with each training batch, which can be useful to make sure the model outputs reasonably coherent text snippets.